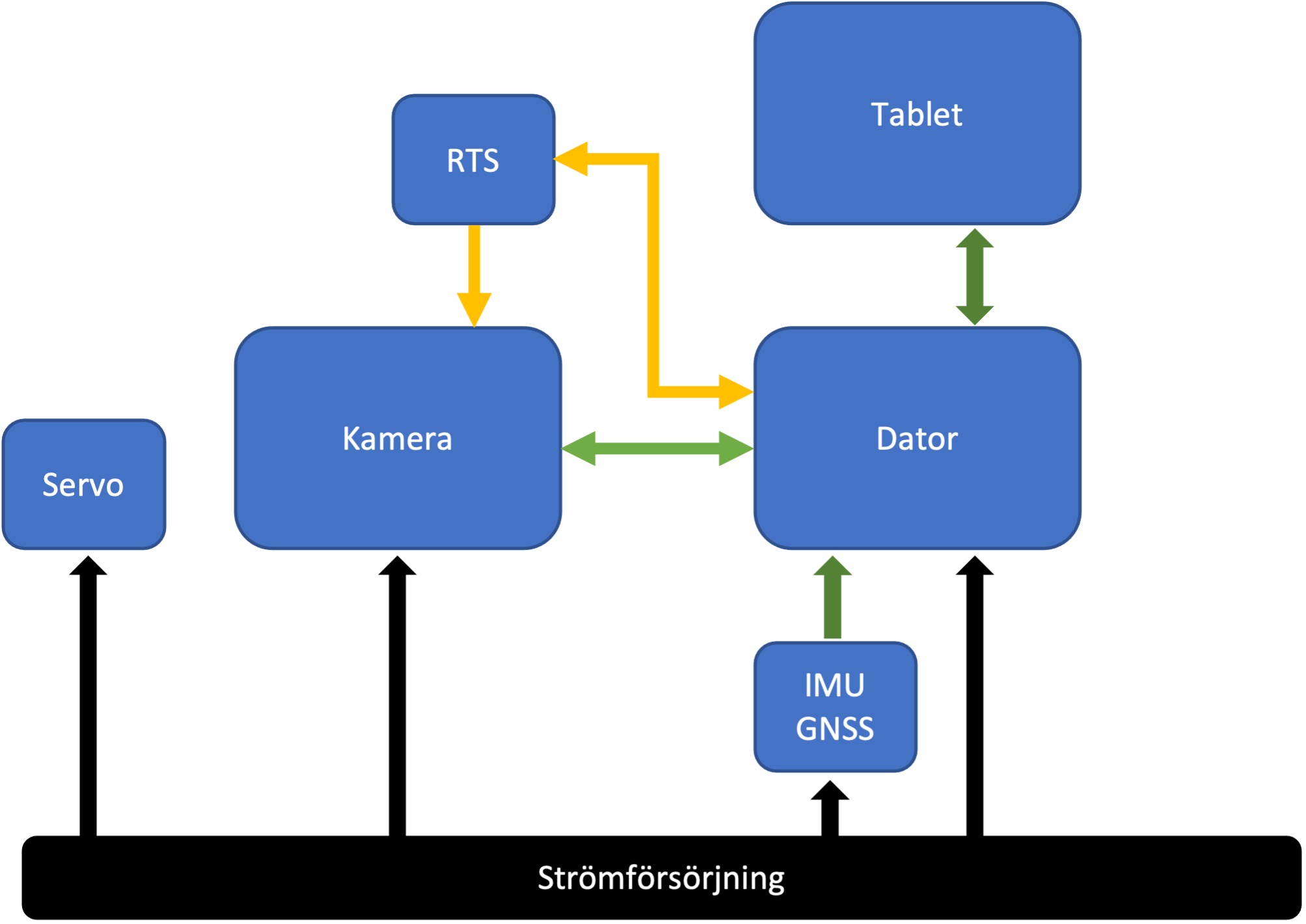
Översikt
Kamera - lodfoto
Vi använder en Hasselblad H3DII-39 kamera med ett HC 50 mm vidvinkelobjektiv. Kameran är anpassad till lodfoto genom att både bakstycket med sensor och objektivet är fastgjort på kamerakroppen. Detta är av flera skäl där de två främsta är att:
- Objektiv och/eller bakstycke inte ska skaka loss och falla mot marken.
- Förändringar i kamerans interna geometri skall bibehållas.
Kameran är uppmätt och kalibrerad (2012) för att kunna användas i fotogrammetri applikationer, t.ex. Erdas Imagine.
Enheten strömförsörjs i första hand via Hasselblad DC Power Grip som i sin tur är kopplad till
strömförsörjnings bussen. Skulle detta fallera kan HB's batterier användas.
Styrning av kamerans inställningar såsom slutartid, bländarvärde etc sker via datorn. Efter exponering sänds bilderna till anvisad katalog på datorn.
Snedbilder
För snedbilder används med fördel en snabb handhållen kamera, förslagsvis med bildstabilisering och ett zoomobjektiv.
Dator
Apple Macbook Pro 16.
Datorn kommunicerar med en läsplatta (iPad) via
antingen Apple´s inbyggda skärmdubbleringsprotokoll eller via Luna Display (separat hårdvara krävs).
Om Apple´s protokoll skall användas så krävs att datorn ska vara utrustad med Touch Bar (MBP t.o.m. 2019) för att
användaren skall kunna ge kommandon till systemet via läsplatta.
Luna Display fungerar oavsett vald Macbook.
Tablet
En Apple iPad Pro används som monitor för pilot.
Både datakommunikationen och strömförsörjning
sker via USB-C Lightning kabel (beroende på årsmodell).
IMU/GNSS
Crossbow NAV-440.
Används för flygplanets position och lägesbestämning.
Position från GPS (WAAS) med latitud, longitud samt altitud och läge (6-DOF) från IMU.
Enheten är monterad på samma stativ som kameran.
RTS
Remote Trigger System
När en bild ska tas, antingen manuellt eller automatiskt, skickas en signal från dator till RTS som fjärrutlöser kameran.
Servo
Ett servo är monterad på stativets bottenplatta och kan via ett vred ändra läget på plattan och därmed kameran i girplanet.
Syftet med detta är att kunna korrigera kamerans vinkel visavi flygplanets vinkel gentemot fotopunktens önskade vinkel, t.ex. korrigera för vindupphållning.
