IMU/GPS
För flygplanets position och lägesbestämning används en Crossbow NAV440 (Memsic, Moog)). IMU ger 6 DOF med en 3 axlad intern magnetometer.
GPS enheten är WAAS kapabel.
Position från GPS (WAAS) med latitud, longitud samt altitud.
Enheten är monterad på samma stativ som kameran och strömsatt från strömförsörjningsenheten (PU) via D-Sub.
Dataström från NAV440 är i N1 format (Crossbow format), det är dock möjligt att begränsa utdata från enheten till endast NMEA.
Inställningar och kalibrering görs via Windows-appen NAV-VIEW 2.X. Kalibrering bör göras då magnetometerns värde avviker (hur mycket avgörs av brukare) från kompass.
RTS - Remote Trigger System
RTS är en elektronisk fjärrutlösare som kopllas till kameran. För att aktivera triggern så sänds en signal från appen Dark Aero till kameran. Signalen resulterar i att ett optiskt relä (optocoupler) aktiveras i RTS som i sin tur sluter en krets varvid kameran utlöses.
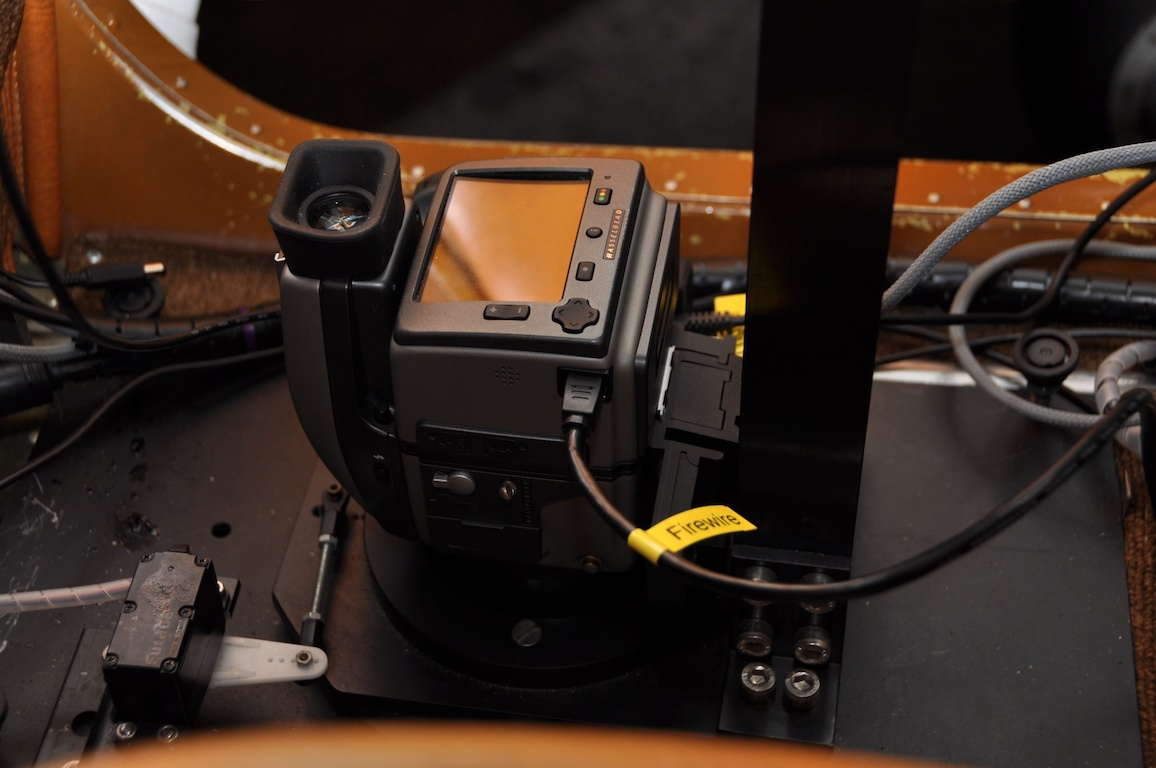
Servo
Ett servo är monterad på stativets bottenplatta och kan via ett vred ändra läget på plattan och därmed kameran i girplanet.
Syftet med detta är att kunna korrigera kamerans vinkel visavi flygplanets vinkel gentemot fotopunktens önskade vinkel, t.ex. korrigera för vindupphållning.
PU - Power Unit
Via PU, strömförjsörjningsenheten, tillgodoses alla systemenheters strömbehov via uppsäkrade uttag.
Ström till PU tas via en Alphenol kontakt på flygplanets instrumentpanel.
- PU
- 12V
- Dator
- via USB-C
- Kamera
- 7.5V / 6A
- IMU/GPS
- 12V (9-42 VDC tillåtet) via DB-15
- RTS
- via USB
- Dubbel USB-A uttag
- 5V